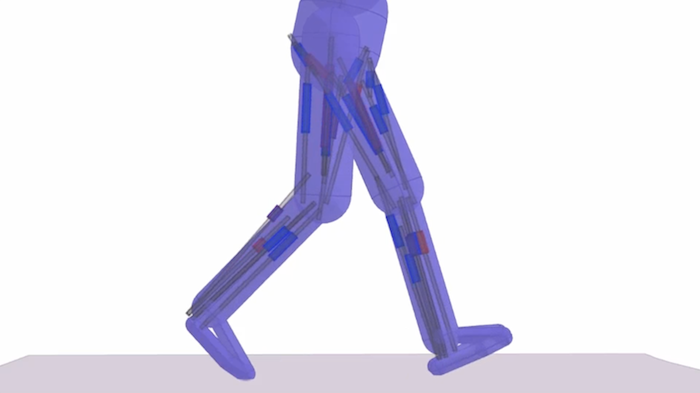
We present a trajectory optimization approach to animating human activities that are driven by the lower body. Our approach is based on contact-invariant optimization. We develop a simplified and generalized formulation of contact-invariant optimization that enables continuous optimization over contact timings. This formulation is applied to a fully physical humanoid model whose lower limbs are actuated by musculotendon units. Our approach does not rely on prior motion data or on task-specific controllers. Motion is synthesized from first principles, given only a detailed physical model of the body and spacetime constraints. We demonstrate the approach on a variety of activities, such as walking, running, jumping, and kicking. Our approach produces walking motions that quantitatively match ground-truth data, and predicts aspects of human gait initiation, incline walking, and locomotion in reduced gravity.
Animating Human Lower Limbs Using Contact-Invariant Optimization