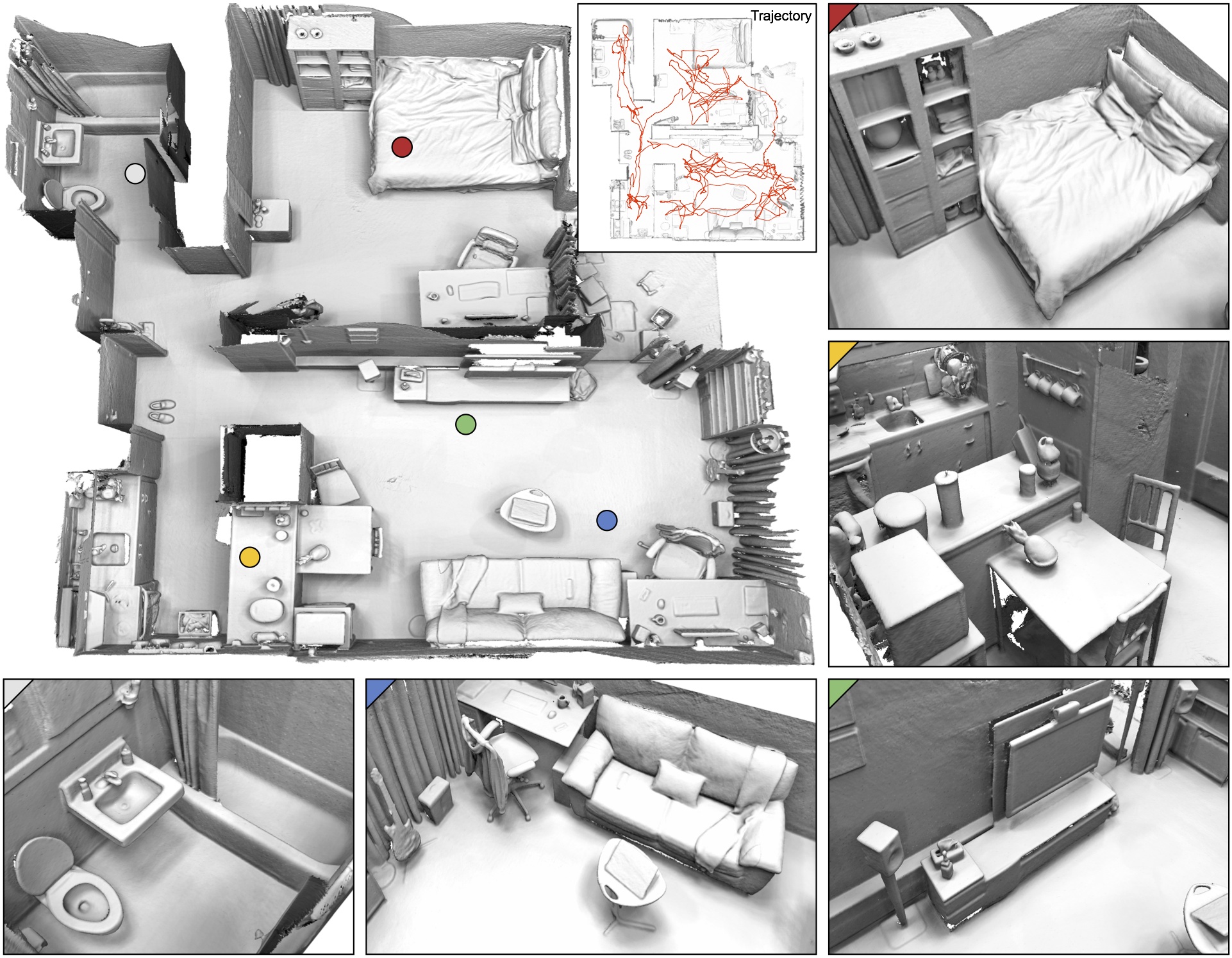
We present an approach to indoor scene reconstruction from RGB-D video. The key idea is to combine geometric registration of scene fragments with robust global optimization based on line processes. Geometric registration is error-prone due to sensor noise, which leads to aliasing of geometric detail and inability to disambiguate different surfaces in the scene. The presented optimization approach disables erroneous geometric alignments even when they significantly outnumber correct ones. Experimental results demonstrate that the presented approach substantially increases the accuracy of reconstructed scene models.
Robust Reconstruction of Indoor Scenes