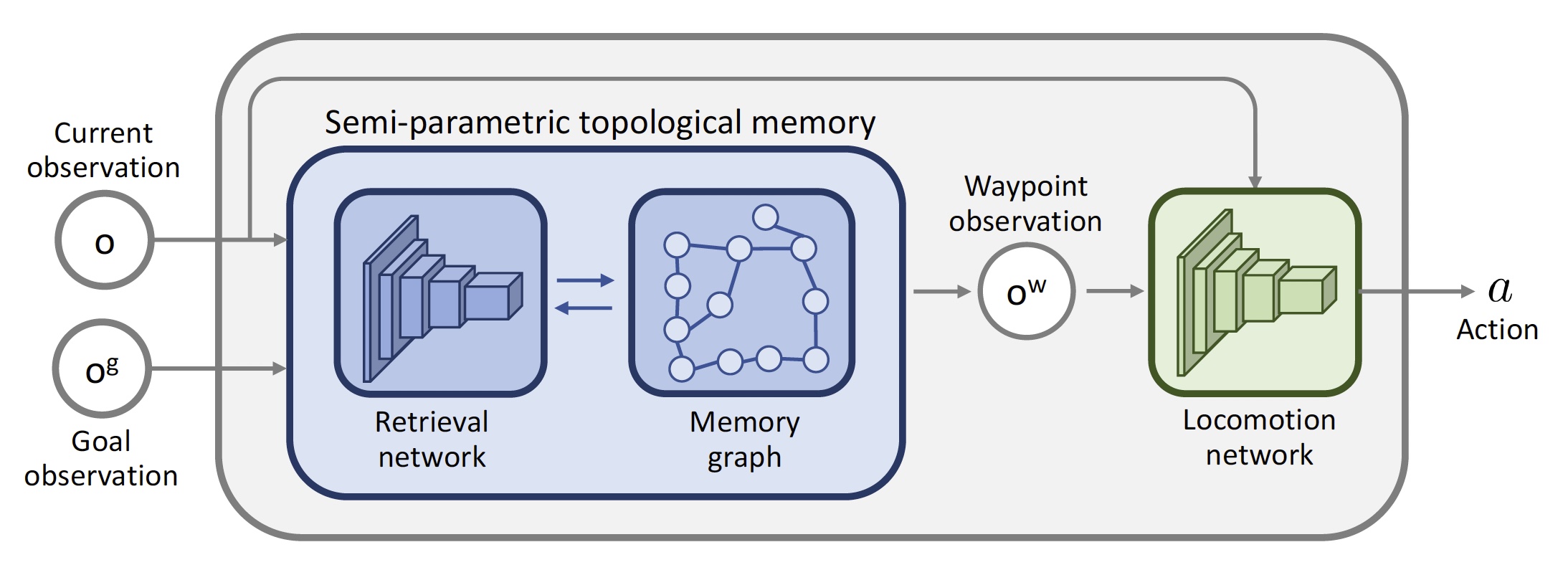
We introduce a new memory architecture for navigation in previously unseen environments, inspired by landmark-based navigation in animals. The proposed semi-parametric topological memory (SPTM) consists of a (non-parametric) graph with nodes corresponding to locations in the environment and a (parametric) deep network capable of retrieving nodes from the graph based on observations. The graph stores no metric information, only connectivity of locations corresponding to the nodes. We use SPTM as a planning module in a navigation system. Given only 5 minutes of footage of a previously unseen maze, an SPTM-based navigation agent can build a topological map of the environment and use it to confidently navigate towards goals. The average success rate of the SPTM agent in goal-directed navigation across test environments is higher than the best-performing baseline by a factor of three.
Semi-parametric Topological Memory for Navigation