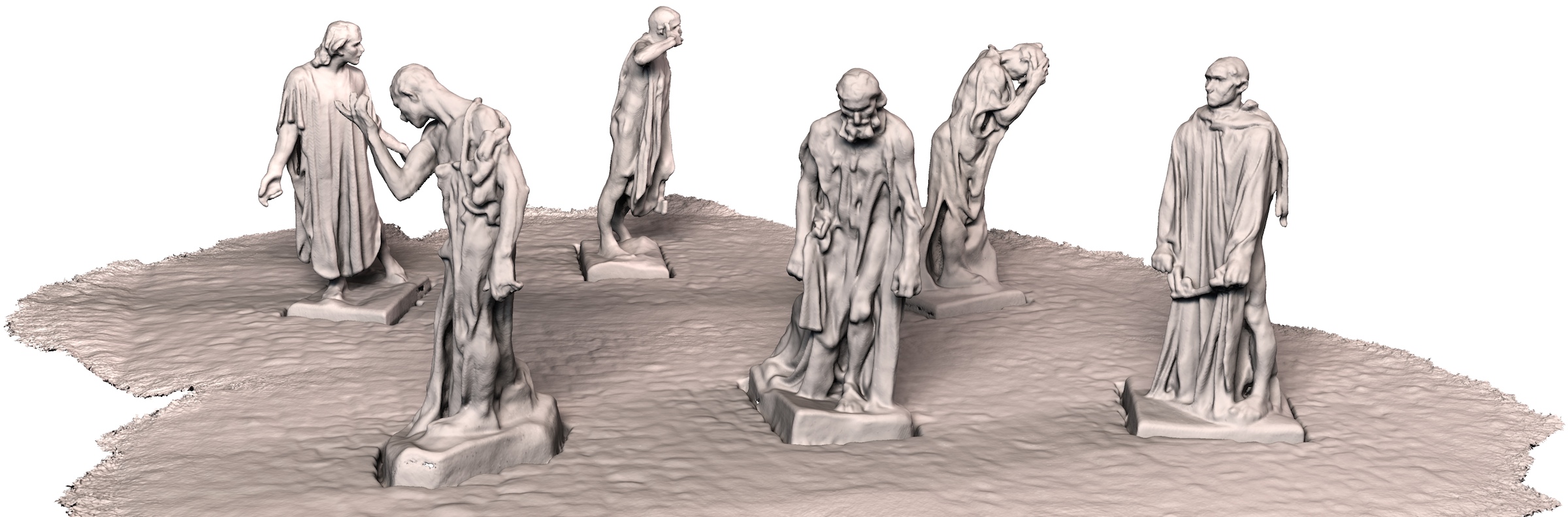
We present an approach to detailed reconstruction of complex real-world scenes with a handheld commodity range sensor. The user moves the sensor freely through the environment and images the scene. An offline registration and integration pipeline produces a detailed scene model. To deal with the complex sensor trajectories required to produce detailed reconstructions with a consumer-grade sensor, our pipeline detects points of interest in the scene and preserves detailed geometry around them while a global optimization distributes residual registration errors through the environment. Our results demonstrate that detailed reconstructions of complex scenes can be obtained with a consumer-grade camera.
Dense Scene Reconstruction with Points of Interest