We have shown that high-fidelity human motion can be synthesized from first principles, given only a model of the human body and a compact set of objectives. For example, our techniques produce high-fidelity walking motion given a human model and the goal of advancing the center of mass forward at a specified velocity. The same techniques produce realistic running when the desired velocity is increased, without any other modifications to the objective or the model. We have shown that such de novo optimization can predict human motion both qualitatively and quantitatively.
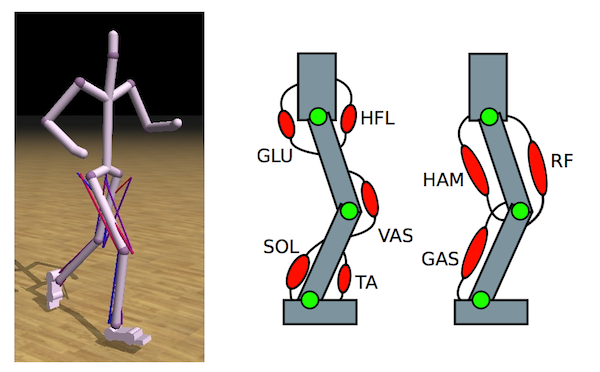
Simulation of Human Motion