Publications
Brennan Shacklett, Luc Guy Rosenzweig, Zhiqiang Xie, Bidipta Sarkar, Andrew Szot, Erik Wijmans, Vladlen Koltun, Dhruv Batra, Kayvon Fatahalian
ACM Transactions on Graphics, 42(4), 2023
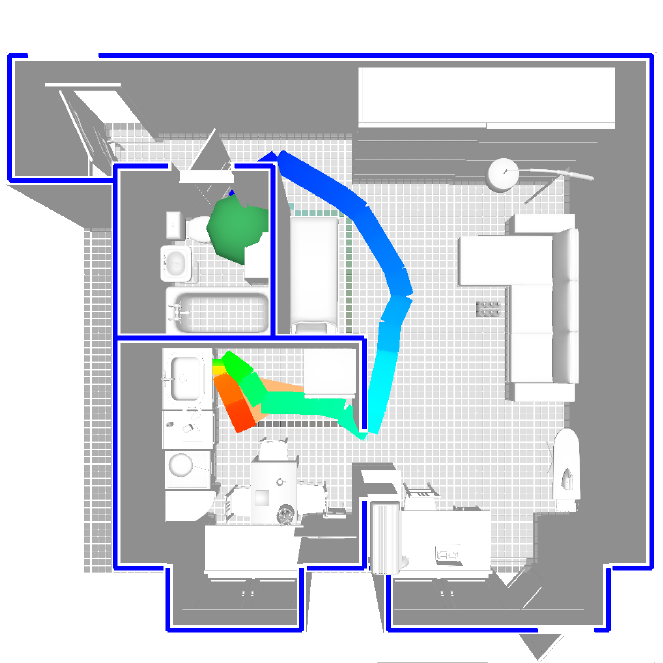
Andrew Szot, Alexander Clegg, Eric Undersander, Erik Wijmans, Yili Zhao, John M Turner, Noah D Maestre, Mustafa Mukadam, Devendra Singh Chaplot, Oleksandr Maksymets, Aaron Gokaslan, Vladimír Vondruš, Franziska Meier, Wojciech Galuba, Angel X Chang, Zsolt Kira, Vladlen Koltun, Jitendra Malik, Manolis Savva, Dhruv Batra
Advances in Neural Information Processing Systems (NeurIPS), 2021
(Selected for spotlight presentation)
Dian Chen, Vladlen Koltun, and Philipp Krähenbühl
International Conference on Computer Vision (ICCV), 2021 (Selected for full oral presentation)
Aleksei Petrenko, Erik Wijmans, Brennan Shacklett, and Vladlen Koltun
International Conference on Machine Learning (ICML), 2021
Brennan Shacklett, Erik Wijmans, Aleksei Petrenko, Manolis Savva, Dhruv Batra, Vladlen Koltun, Kayvon Fatahalian
International Conference on Learning Representations (ICLR), 2021
Dhruv Batra, Angel X. Chang, Sonia Chernova, Andrew J. Davison, Jia Deng, Vladlen Koltun, Sergey Levine, Jitendra Malik, Igor Mordatch, Roozbeh Mottaghi, Manolis Savva, Hao Su
Technical Report, arXiv:2011.01975, 2020
Aleksei Petrenko, Zhehui Huang, Tushar Kumar, Gaurav Sukhatme, and Vladlen Koltun
International Conference on Machine Learning (ICML), 2020
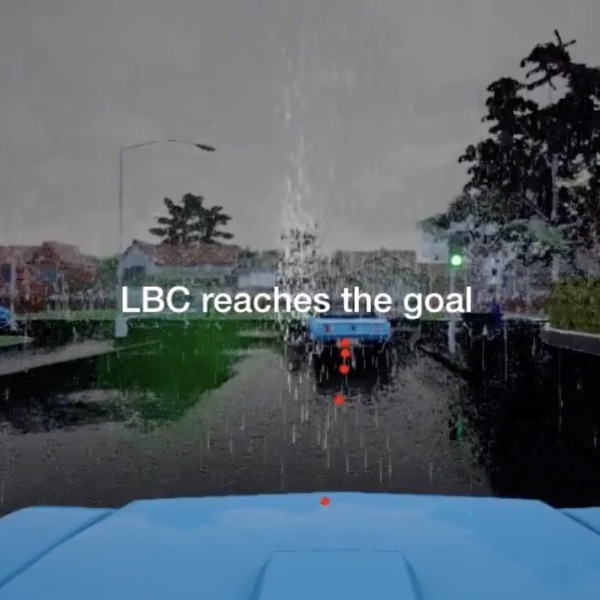
Dian Chen, Brady Zhou, Vladlen Koltun, and Philipp Krähenbühl
Conference on Robot Learning (CoRL), 2019
Manolis Savva, Abhishek Kadian, Oleksandr Maksymets, Yili Zhao, Erik Wijmans, Bhavana Jain, Julian Straub, Jia Liu, Vladlen Koltun, Jitendra Malik, Devi Parikh, Dhruv Batra
International Conference on Computer Vision (ICCV), 2019 (Nominated for the Best Paper Award)
Dmytro Mishkin, Alexey Dosovitskiy, and Vladlen Koltun
Technical Report, arXiv:1901.10915, 2019
Brady Zhou, Philipp Krähenbühl, and Vladlen Koltun
Science Robotics, 4(30), 2019
Charles Packer, Katelyn Gao, Jernej Kos, Philipp Krähenbühl, Vladlen Koltun, Dawn Song
Technical Report, arXiv:1810.12282, 2019
Peter Anderson, Angel Chang, Devendra Singh Chaplot, Alexey Dosovitskiy, Saurabh Gupta, Vladlen Koltun, Jana Kosecka, Jitendra Malik, Roozbeh Mottaghi, Manolis Savva, Amir R. Zamir
Technical Report, arXiv:1807.06757, 2018
Artemij Amiranashvili, Alexey Dosovitskiy, Vladlen Koltun, and Thomas Brox
Conference on Robot Learning (CoRL), 2018
Matthias Müller, Alexey Dosovitskiy, Bernard Ghanem, and Vladlen Koltun
Conference on Robot Learning (CoRL), 2018
Felipe Codevilla, Antonio López, Vladlen Koltun, and Alexey Dosovitskiy
European Conference on Computer Vision (ECCV), 2018
Nikolay Savinov, Alexey Dosovitskiy, and Vladlen Koltun
International Conference on Learning Representations (ICLR), 2018
Artemij Amiranashvili, Alexey Dosovitskiy, Vladlen Koltun, and Thomas Brox
International Conference on Learning Representations (ICLR), 2018
Felipe Codevilla, Matthias Müller, Antonio López, Vladlen Koltun, and Alexey Dosovitskiy
International Conference on Robotics and Automation (ICRA), 2018
Manolis Savva, Angel X. Chang, Alexey Dosovitskiy, Thomas Funkhouser, and Vladlen Koltun
Technical Report, arXiv:1712.03931, 2017
Alexey Dosovitskiy, German Ros, Felipe Codevilla, Antonio López, and Vladlen Koltun
Conference on Robot Learning (CoRL), 2017
Alexey Dosovitskiy and Vladlen Koltun
International Conference on Learning Representations (ICLR), 2017 (Selected for full oral presentation)